
AGVs and AMRs, Delivery Robots,
Electric Wheelchairs
Product Features
● Compact & Powerful
Our BLDC motors generate high output for their size. Engineered to be slim, their structure provides flexible product design.
● IPX4 Rated-Water Resistant Design
Our motors and controllers have an IPX4 rating. The water-resistant design is ideal for products operated in demanding conditions and outdoors (e.g. delivery robots, agricultural robots).
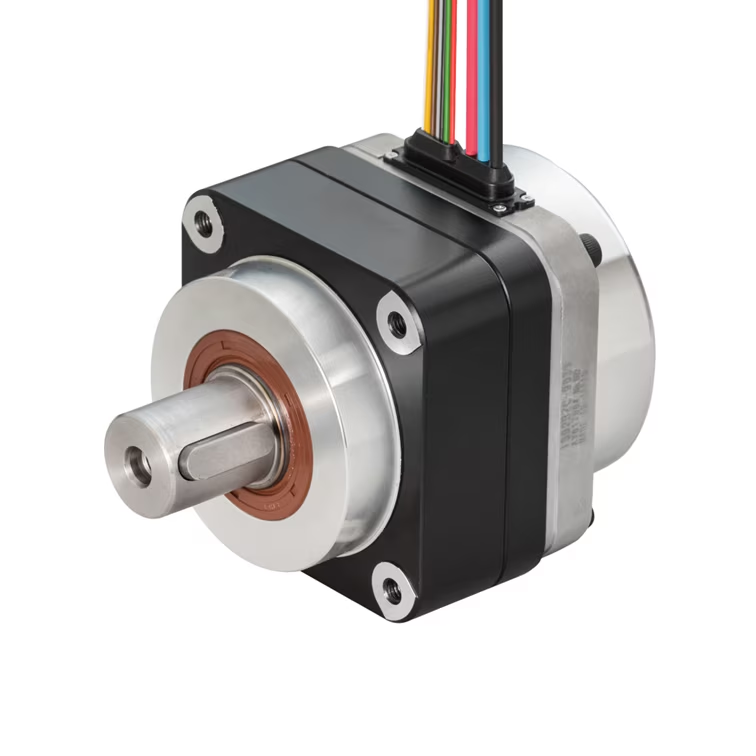
● Perfect Reduction Gear for Mobile Robot Applications
A planetary reduction mechanism suitable for high torque is used, making it possible to directly support the radial load applied to the output shaft of this unit when AGVs or AMRs transport cargo.
● Geared Unit Type
With planetary gear (reduction ratio 10.33:1) .


regarding usage and mass production support.
Performance Table
| Sensor Type | Hall sensor |
| Nominal Voltage | 24 V |
| Operating Voltage | 15-55 V |
| Peak Power | 342 W (10 s max.) |
| Peak Torque | 17.2 Nm (10 s max.) |
| No-Load Speed | 270 rpm |
| Rated Power | 202 W |
| Rated Torque | 8.6 Nm |
| Rated Speed | 225 rpm |
| Dimensions | 85.0 mm × 85.0 mm × 84.5 mm |
| Weight | 2.2 kg |
| Reduction Ratio | 10.33 : 1 |
| Max. Permissible Radial Load | 700 N |
| Max. Permissible Load Inertia | 0.6 kg・m2 (Applicable acceleration rate: 200 rpm/s) |
| Dielectric Strength | 500 V AC 1 minute (between terminal and motor housing) |
| Insulation Resistance | 10 MΩ (min.) (500 V DC) |
| Water Ingress Protection | IPX4 (When using the appropriate mating connectors) |
| Standards / Certification / Directives |
RoHS |
| Controller |
DS-34EC1-IS2□□ |
*Click here for extension and connection cables.
Performance Curve

Drawing
